METAL ARM · CNC ALUMINUM
[ LIGHTWEIGHT 6-AXIS ROBOTIC ARM · EMBODIED AI ]
MakerMods
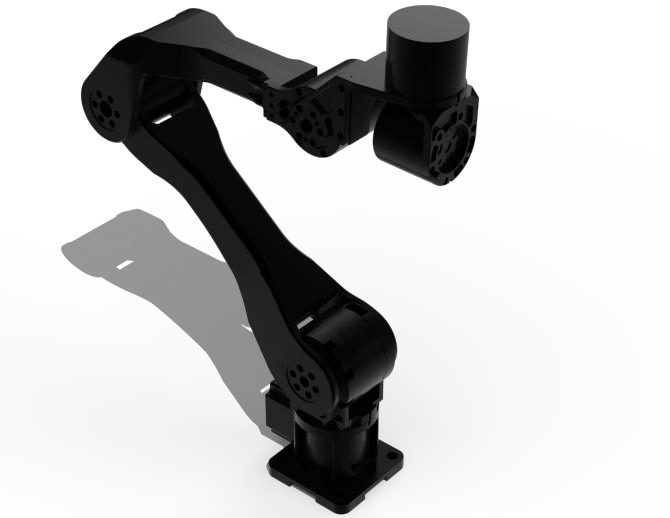
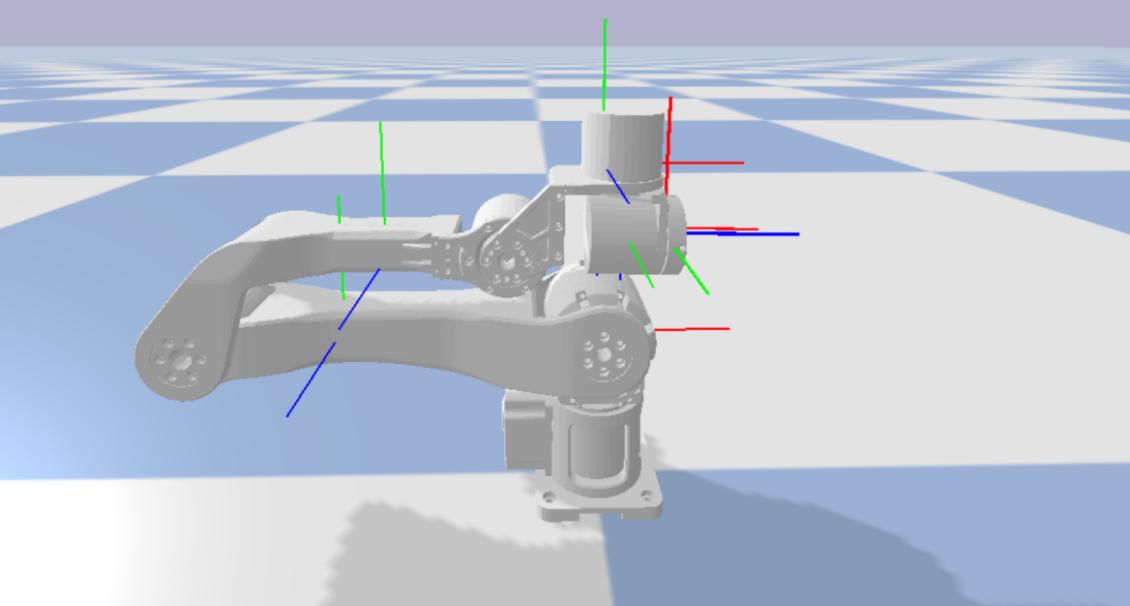
Metal Arm.
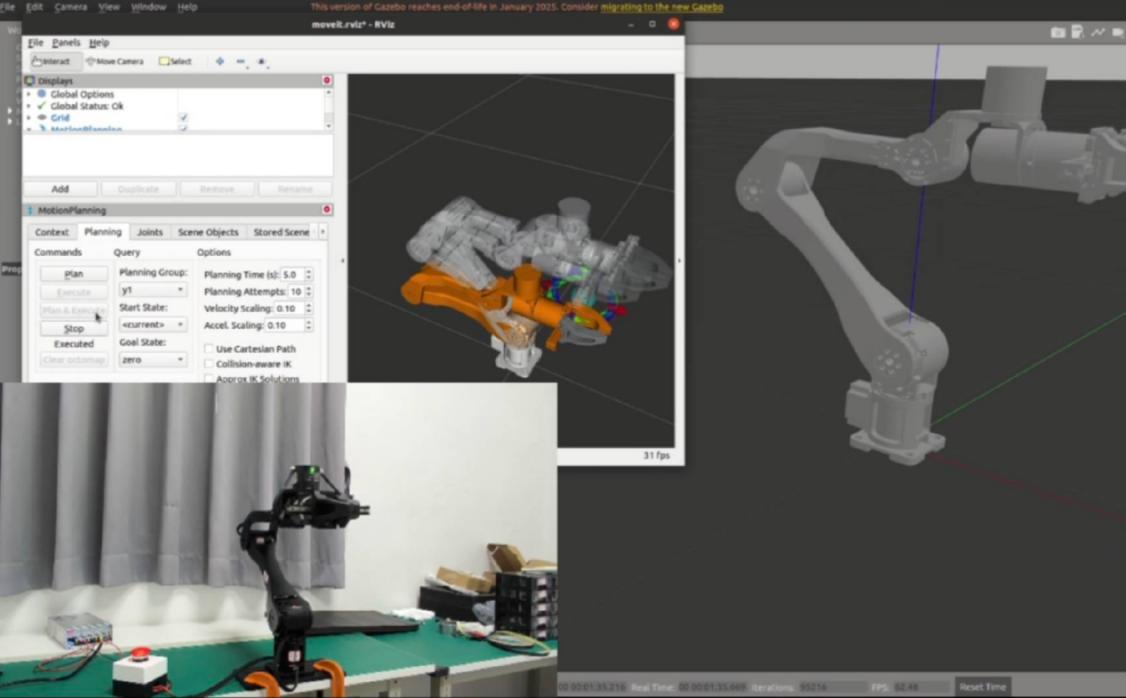
A lightweight, all-CNC-aluminum six-axis manipulator built for embodied AI, research, and education. 3 kg payload, ±0.1 mm repeatability, open SDK, ready for ROS, MoveIt, LeRobot, and VLA training out of the box.
$2,499
from $99 deposit to pre-order · fully assembled
[ PRE-ORDER → ]
mit license · open sdk · ros1 / ros2